大连1号-连理卫星(技术文档)
卫星概述
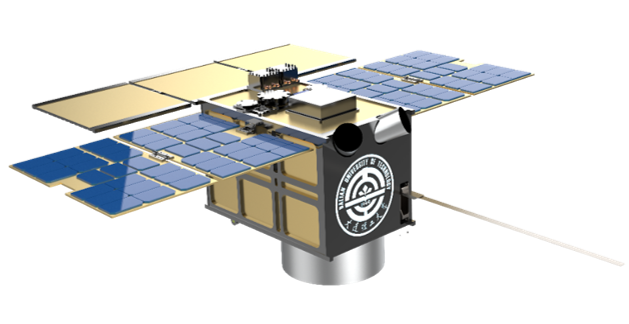
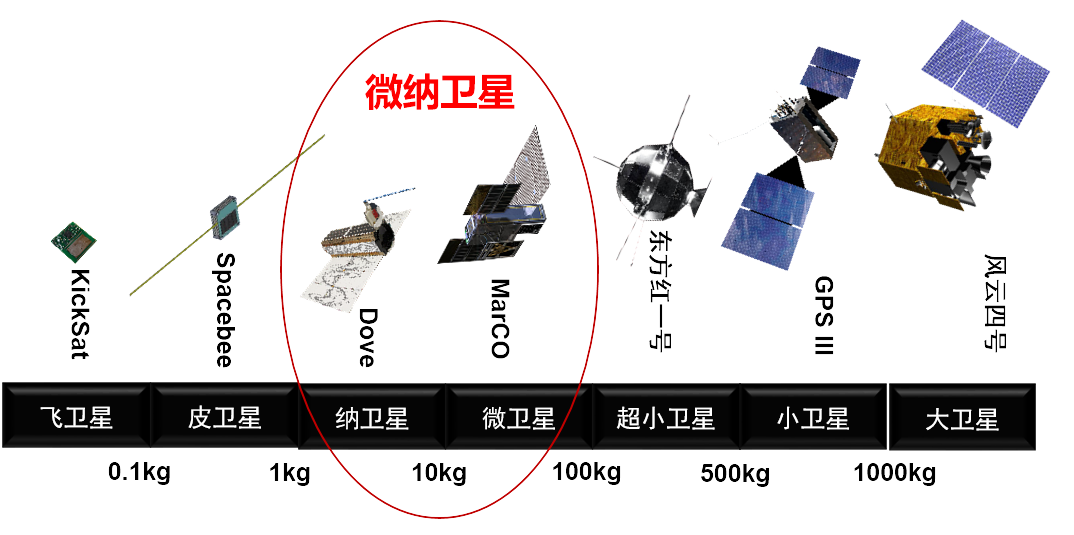
大连1号—连理卫星(Lianli)(以下简称连理卫星)是一颗12U的高分辨率对地遥感立方星,质量为17 kg,体积为1012.3mmx428mmx403mm(展开状态),并使用大连理工大学自有X频段地面测控站(辽宁省第一套地面站)进行测控,主要功能是验证高分辨率遥感成像、国产高可靠OpenHarmony操作系统、先进卫星部组件与基于3D打印技术的超轻型部署器等一系列创新技术。
卫星的主载荷为高分辨率多光谱相机,相机具有全色谱和多光谱共5个谱段,能够在轨实现低成本亚米级高分辨率的海洋/对地观测。OpenHarmony操作系统与国产处理芯片综合方案的使用,让系统的性能与可靠性大幅提高。不同于传统的卫星姿轨控动力系统所采用的肼类有毒推进剂,这颗卫星使用了创新的硝酸羟胺(HAN)单组元模块推进系统,具有绿色无毒、能量高、功耗低、可预包装等特点,大幅提升了微纳卫星在轨快速机动能力。
北京时间2024年1月18日14时许,连理卫星从天舟六号货运飞船成功释放入轨,现正常在轨飞行。
总体指标
| 指标名称 | 设计值 | 指标名称 | 设计值 |
|---|---|---|---|
| 轨道 | 400 km x 400 km | 定轨精度 | 优于5m(1σ) |
| 轨道倾角 | 42.8° | 国际卫星标识符 | 2023-063A |
| 姿态确定精度 | 优于0.03°(3σ) | 姿态指向精度 | 优于0.05°(3σ) |
| 姿态稳定度 | 优于0.003°/s(3σ) | 姿态机动能力 | 优于2°/s |
| 母线电压 | 9~12.3V | 蓄电池容量 | ≥15Ah |
| 数传模式 | 明传/密传 | 数传码速率 | 400Mbps |
| 分辨率 | 优于1m@400km | 推扫幅宽 | 优于9.2km@400km |
| 卫星质量 | 17kg | 卫星寿命 | ≥1年 |
推扫模式谱段:
- PAN:450~700nm
- B1:430~510nm
- B2:510~580nm
- B3:630~690nm
- B4:740~895nm
方案设计
姿态控制分系统
- 轨道测量由导航接收机提供导航位速信息(位置精度5m,速度精度0.1m/s);
- 姿态测量部件包括磁强计、MEMS陀螺仪、数字太阳敏感器(精度0.5°)、光纤陀螺(零偏稳定性1.5°/h)、星敏感器(定姿精度5″);
- 中心控制单元与综合电子共用计算机,负责统一调度控制算法、任务流程、数据接口和时序等,控制频率4Hz;
- 执行机构包括反作用飞轮(最大力矩2.22mNm)、磁力矩器(最大磁矩1Am²)、推进系统(比冲0.5N,总冲600Ns)。
卫星的工作模式主要有箭上模式、星箭分离模式、速度阻尼模式、在轨待机模式、业务模式、轨控模式、安全模式7个工作模式;业务模式细化为推扫成像、凝视成像模式、凝视数传模式、AI图像识别模式以及数据压缩模式;当满足模式切换条件时,卫星可自主进行模式跳转,在各个模式跳转过程中,卫星能够完成各种工况下的自主配置,从而实现卫星从发射到在轨执行各种业务的稳定运行。
综合电子分系统
主要完成星务管理、整星时统管理、姿态控制运算、测控通信及有效载荷任务的控制管理。
- 采用SOC片上系统处理器作为主控芯片,主频100MHz,集成Mems陀螺仪和磁强计;
- 提供2路CAN总线接口;
- 提供4路RS422接口;
- 提供磁力矩器驱动控制;
- 提供帆板展开信号;
- 提供星箭分离信号。
测控数传分系统
采用X频段测控和数传一体化设计,降低系统的体积、重量和功耗。
- 负责遥控、遥测信号在卫星与地面站之间的传输,以及地面测控网对卫星的跟踪;
- 负责实现载荷数据对地数传功能;
- 遥测与数传采取分时工作方式;
- 遥控遥测采用BPSK加直序扩频方式;
- 数传采用QPSK方式,速率400Mbps。
电源分系统
电源分系统示意图
电源分系统由太阳电池阵、锂离子蓄电池组和电源控制器组成。母线电压范围9V~12.3V。采用限压式的充电方式,太阳供电与充电功能合一。
- 在轨期间,为卫星提供一次电源,保证各仪器设备的正常工作;
- 发射前,由太阳电池阵模拟器为蓄电池充电;
- 为分系统单机设备或部件供电;
- 蓄电池组3串6并,容量15Ah;
- 一次母线可控配电8路,二次母线可控配电11路;
- 太阳电池阵供电能力:≥48W;
- 实现整星温度测量及加热带控制。
载荷分系统
光学相机结构示意图
相机(不含对外接口)主要由反射镜组件、校正镜、主承力结构以及主背板等组成。
- 成像模式:推扫、凝视视频;
- 谱段:全色,多光谱B/G/R/NIR;
- 1m@500km;
- 静态传函:≥0.15;
- 信噪比: ≥38dB;
- 焦距:1300mm;
- 重量:3.5kg;
- 功耗:13W(成像),20W(在轨识别);
- 像元尺寸:3.2μm。
试验载荷分系统
一体姿态测量单元(AMU)与OpenHarmony
一体姿态测量单元(AMU)采用开源鸿蒙航天实时操作系统,内部集成太阳敏感器、三轴陀螺仪、三轴磁强计、温度传感器以及高性能处理器,可以实时测量航天器的三轴姿态信息,并进一步实现低精度的姿态确定功能。
- 体积:40mm×40mm×10mm;
- 质量:40g;
- 姿态确定精度:≤1°;
- 通信接口:CAN;
- 供电电压:5V±5%;
- 数据更新率:≥10Hz。
HAN推进具有绿色无毒、能量高、可实现预包装(免现场加注)等优点。推进系统采用模块化设计,集成了包括推进剂贮箱、电磁阀、压力传感器等。系统高度集成在1U空间内。
- 体积:96mm×93mm×119mm;
- 推力:~0.5N;
- 羽流全角:30°;
- 额定真空比冲:210s;
- 总冲:≥600Ns(1200Ns);
- 最小脉宽:100ms;
- 工作电压:12V。
轨道部署
UMSD部署器

部署器通过弹簧将立方星弹射出箱体,开关是通过记忆合金分离螺母完成。主要包括舱门、展开锁定机构、3D打印框架结构、分离弹簧、舱门解锁机构、蒙皮、热控组件及分离控制盒等组成。
- 分离速度:1.2m/s;
- 角度偏差:<3°;
- 解锁机构:记忆合金分离螺母;
- 通电时间:2s;
- 分离电阻:1±0.2Ω;
- 分离能量需求:<50J;
- 包络:343.5mm×470mm×516.3mm。
部署器各动作时机
- 发射段:部署器承受火箭加速度及振动引起的载荷作用。
- 停靠段:为卫星提供存储空间以及合适的空间环境,包括温度控制及空间防护。分离控制盒提供配电、温度模拟量采集转发等功能。
- 撤离段:接收到卫星分离指令后,控制解锁机构内分离螺母将销子拔出将舱门打开。卫星在弹簧的作用下弹出,实现部署。
与货船接口设计
- 安装位置需求:后锥段;
- 电气接口:提供1路100V供电,稳态功率50W;
- 指令需要:2次分离脉冲信号;
- 分离电压:0~5V;脉宽:200ms;脉冲间隔:2s;
- 在轨操作需求:无需航天员在轨操作。
空间站在轨飞行
2023年5月10日21时,大连1号—连理卫星搭载天舟六号货运飞船,随长征七号遥七运载火箭成功发射,连理卫星位于天舟六号货船后锥段。直至2024年1月12日分离前,天舟六号货船作为中国空间站的一部分在轨飞行,北京航天飞行控制中心的实时监控数据监测,连理卫星一切状态正常。
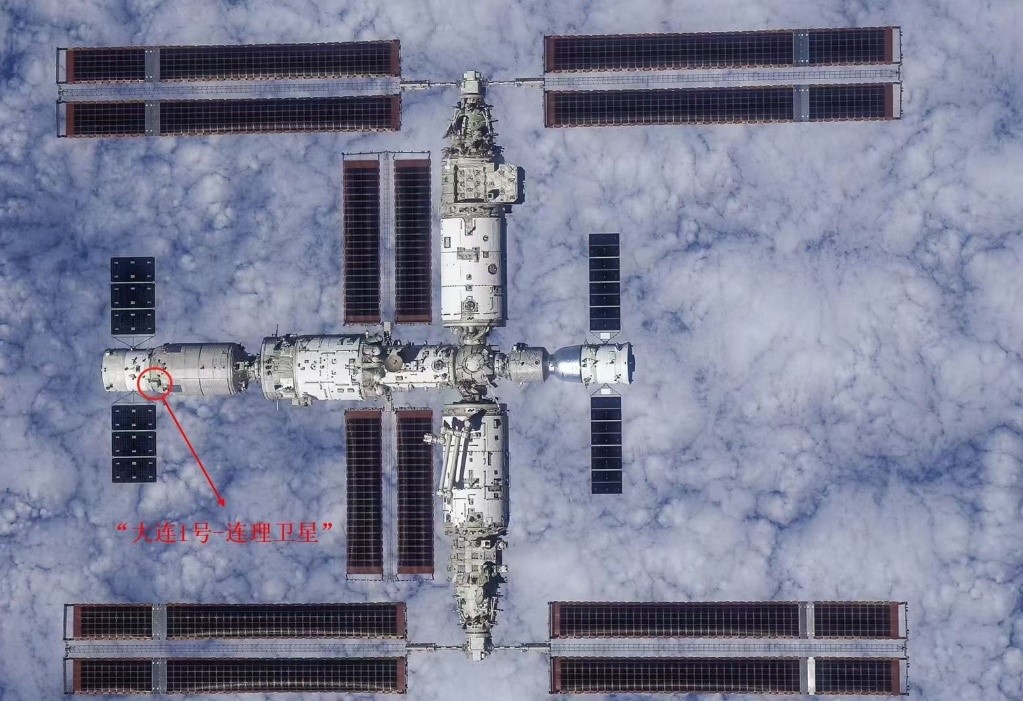
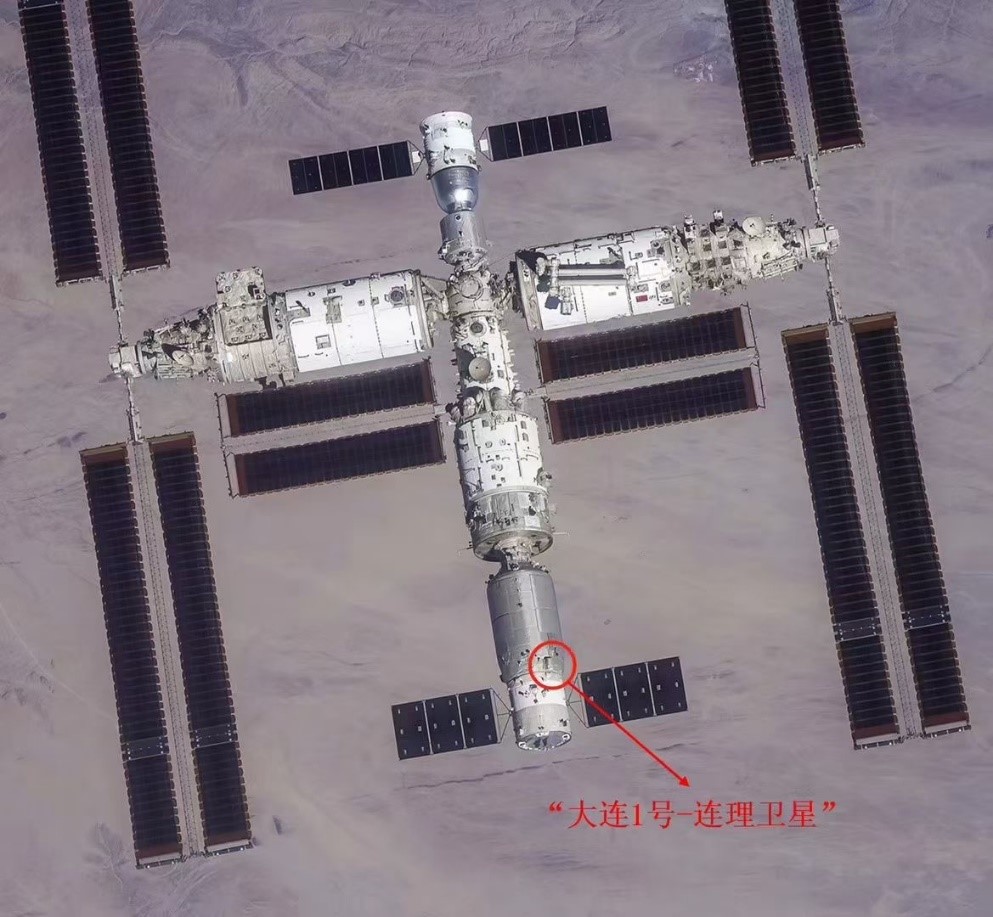
2024年1月18日14时,连理卫星与天舟六号分离,进入独立飞行阶段.
截止目前,连理卫星各系统工作正常。
技术牵引
- 连理卫星获取高分辨率图像并实现在轨目标识别,代表了同量级卫星遥感的较高水平,对相关领域发展具有重要的促进作用(图像数据将面向校内各学科免费开放下载);
- 连理卫星采用了一系列创新先进技术,包括绿色HAN推进技术、一体姿态测量技术等,对于国内微纳卫星发展具有重大意义。
- 新型微纳卫星超轻型释放机构将验证一系列先进技术。包括整体3D打印技术、多星释放与状态监测控制器技术、记忆合金分离螺母解锁机构等。已经用于国内近10种火箭/飞船型号飞行任务中。
- 连理卫星多个部组件所采用的OpenHarmony实时操作系统,在任务调度机制、硬件支持程度、开发费用、稳定性等方面都表现优异,该系统针对航天场景进行了优化,大幅提高了操作系统及各单机的可靠性。目前,大连理工大学正在牵头制定两项基于OpenHarmony的星载实时操作系统标准。
团队简介
总设计师:夏广庆,工学博士,大连理工大学力学与航空航天学院教授,现任大连理工大学力学与航空航天学院党委书记,主要研究方向为电推进理论与实验、先进空间推进系统设计、微纳卫星总体设计、飞行器流固耦合模拟与测试等。夏广庆–大连理工大学教师主页
总指挥:于晓洲,工学博士,大连理工大学力学与航空航天学院教授,主要研究方向为微小卫星、航天器系统工程、微小卫星先进部组件等。目前全世界唯一一支团队,其研制的立方星搭载过美国的天鹅座(Cygnus)飞船也搭乘过中国的天舟飞船,去过国际空间站也去过中国空间站。于晓洲–大连理工大学教师主页

(英语版王怿辰译)